内容简介
本书是一本纯粹的教读者怎样使用C语言给NXT编程的书籍。为了让读者更好地理解书中的内容,本书尽可能用图片代替文字,并通过多达111个示例程序演示书中几乎所有的知识点。
本书共分为8章,简要介绍NXC语言和如何搭建BricxCC开发环境,并对BricxCC软件进行详细的剖析,系统讲述NXC语言的语法规则和NXC程序结构,介绍怎样利用NXC语言进行电动机和传感器编程以及NXC语言中的一些高级控制命令,并介绍多个NXT设备之间的通信和对NXT设备的远程控制。
本书虽然定位为入门书籍,但是书中的内容和编程技巧不仅适用于新手,对于C语言老手也会有所裨益。对于中学生来说,学习利用NXC为NXT编程,可以为自己今后踏入计算机编程领域奠定坚实的基础。
目 录
第1章 初识
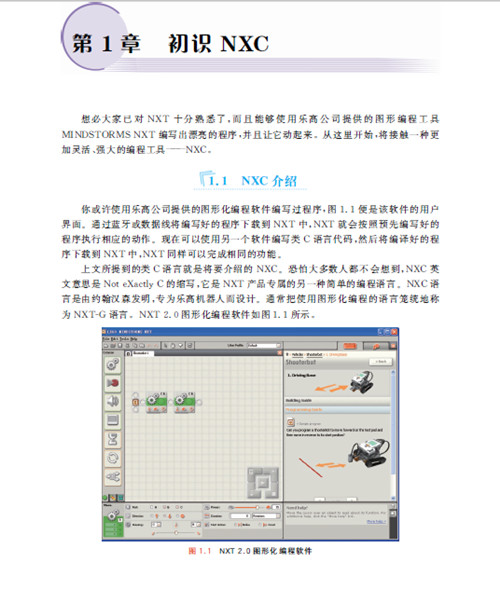
1.1 NXC介绍
1.2 搭建NXC开发环境
1.2.1 BricxCC介绍
1.2.2 下载安装
1.2.3 安装NXT驱动
1.2.4 启动
1.3 编写第一个NXC程序
1.3.1 搭建一个基础机器人
1.3.2 让机器人动起来
1.3.3 编译错误
1.3.4 改变小车的行进路线
1.4 BricxCC工具
1.4.1 直接控制
1.4.2 硬件信息
1.4.3 状态监视
1.4.4 钢琴
1.4.5 操纵杆
1.4.6 浏览器
1.4.7 屏幕监视
1.5 更新固件
1.6 小结
1.7 习题
第2章 探索BricxCC开发环境
2.1 打开
2.1.1 连接
2.1.2 多文档和标签窗口
2.1.3 默认启动选项
2.1.4 编译器设置
2.1.5 工具栏和状态栏
2.2 代码编辑器
2.2.1 一般编辑器选项
2.2.2 编辑器偏好设置
2.2.3 宏命令
2.2.4 颜色配置
2.2.5 选项页面
2.2.6 编辑命令
2.2.7 代码模板
2.2.8 关联文件扩展类型
2.3 文件操作和编辑
2.3.1 文件操作
2.3.2 编辑菜单
2.3.3 搜索菜单
2.3.4 书签
2.3.5 代码补全
2.3.6 参数补全
2.4 视图和编译
2.4.1 模板
2.4.2 代码浏览器
2.4.3 编译和运行
2.5 小结
2.6 习题
第3章 语法规则
3.1 注释和空格
3.1.1 注释
3.1.2 空格
3.2 常量与变量定义
3.2.1 常量和符号常量
3.2.2 变量
3.2.3 标识符
3.3 数据类型
3.3.1 变量类型
3.3.2 类型详解
3.3.3 结构体
3.3.4 数组
3.4 语句
3.4.1 声明变量
3.4.2 赋值
3.4.3 控制结构
3.4.4 其他NXC语句
3.5 表达式
3.5.1 操作符
3.5.2 条件表达式
3.6 小结
3.7 习题
第4章 NXC程序结构
4.1 编码顺序
4.1.1 运行顺序规则
4.1.2 词法顺序规则
4.1.3 任务函数的声明
4.2 任务
4.2.1 任务的定义
4.2.2 任务的启动和停止
4.2.3 多任务同步
4.2.4 多任务实例
4.3 函数
4.3.1 函数的定义
4.3.2 函数的参数和返回值
4.3.3 函数参数的传递
4.3.4 内联函数
4.4 预处理
4.4.1 宏定义
4.4.2 条件编译
4.4.3 文件包含
4.5 小结
4.6 习题
第5章 电动机编程
5.1 电动机初探
5.1.1 转弯
5.1.2 缓慢停止
5.1.3 重复命令
5.1.4 多层嵌套循环
5.2 变量的魅力
5.2.1 螺旋移动
5.2.2 随机运动
5.3 高级命令
5.3.1 速度控制模式
5.3.2 同步模式
5.3.3 转速百分比
5.3.4 角度控制
5.3.5 电动机过度负载
5.4 PID控制
5.4.1 初识
5.4.2 PID函数
5.4.3 PID扩展函数
5.5 小结
5.6 习题
第6章 传感器编程
6.1 触觉传感器
6.1.1 设置触觉传感器
6.1.2 躲避障碍物
6.2 光感应器
6.2.1 设置光感应器
6.2.2 循迹机器人
6.3 声音传感器
6.3.1 设置声音传感器
6.3.2 声控机器人
6.4 超声波传感器
6.4.1 设置超声波传感器
6.4.2 超声波测距和避障
6.5 角度传感器
6.5.1 挖掘NXT电动机潜能
6.5.2 被动测量角度
6.6 传感器的类型和模式
6.6.1 设置传感器
6.6.2 传感器类型
6.6.3 传感器模式
6.7 小结
6.8 习题
第7章 NXC高级控制
7.1 制作音乐
7.1.1 播放声音文件
7.1.2 声音编程
7.1.3 “边跑边叫”
7.2 LCD点阵显示
7.2.1 文本显示
7.2.2 其他显示
7.3 系统计时器
7.3.1 当前计时器值
7.3.2 程序初始计时器值
7.4 文件系统
7.4.1 文件创建与删除
7.4.2 文件的写入
7.4.3 文件的读取
7.4.4 写入已存在文件
7.5 小结
7.6 习题
第8章 NXT之间的通信
8.1 NXT间的通信原理
8.1.1 主从关系
8.1.2 建立连接
8.2 主从通信
8.2.1 信箱
8.2.2 主从消息
8.2.3 回应消息
8.3 直接命令初探
8.3.1 读取电量信息
8.3.2 启动/停止程序
8.3.3 播放声音
8.4 控制从设备电动机
8.4.1 无模式电动机控制
8.4.2 速度控制模式
8.4.3 同步模式
8.4.4 转速百分比
8.4.5 读取从设备输出口信息
8.5 控制从设备传感器
8.5.1 设置从设备输入口状态
8.5.2 获取从设备输入口值
8.5.3 获取从设备声音及光感应器值
8.5.4 设置超声波传感器
8.5.5 获取超声波传感器值
8.6 小结
8.7 习题
附录 宏定义类型
参考文献